
👋 About Me
🎓 I am currently a Ph.D student at School of Mechanical Engineering, Beijing Institute of Technology, advised by Prof. Chao Sun.
🤗 I have been fortunate to collaborate with Beijing Innovation Center of Humanoid Robotics.
✨ My current research interests focus on: 3D Vision and Generative Models.
📫 If you are interested in academic collaboration, feel free to reach me via zhangzhang00@bit.edu.cn — I’d love to connect!
🔥 News
- 2025.02: One paper for roadside perception is accepted by IEEE TITS.
⭐ Selected Papers
* Equal contribution † Corresponding author
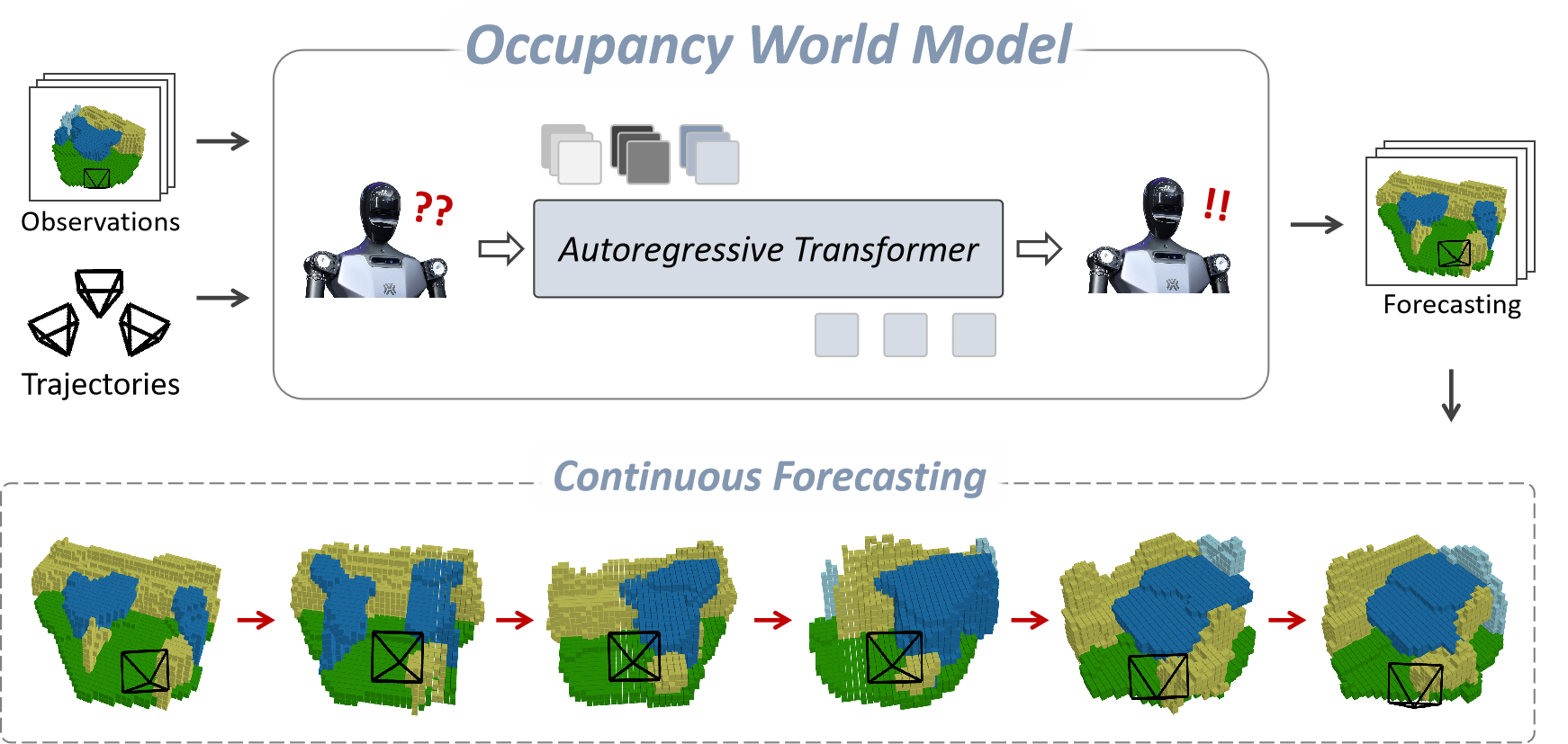
Occupancy World Model for Robots
Zhang Zhang*, Qiang Zhang*, Wei Cui*, Shuai Shi, Yijie Guo, Gang Han, Wen Zhao, Jingkai Sun, Jiahang Cao, Jiaxu Wang, Hao Cheng, Xiaozhu Ju, Zhengping Che, Renjing Xu, Jian Tang†
Under review
- We restructure the OccWorld-ScanNet benchmark to evaluate the forecasting of scene evolutions.
- We propose a occupancy world model for robots’ decision and exploration.
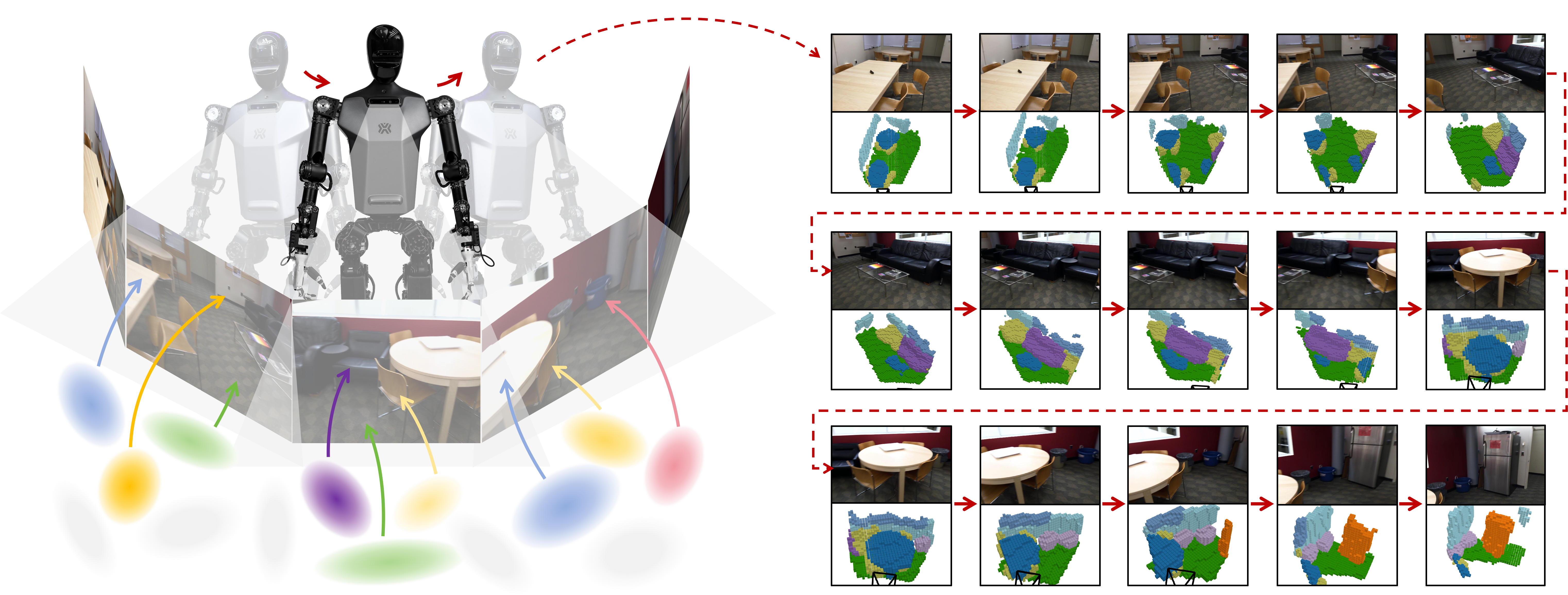
RoboOcc: Enhancing the Geometric and Semantic Scene Understanding for Robots
Zhang Zhang*, Qiang Zhang*, Wei Cui*, Shuai Shi, Yijie Guo, Gang Han, Wen Zhao, Hengle Ren, Renjing Xu, Jian Tang†
Under review
- We present a method to enhance geometric and semantic scene understanding in 3D occupancy prediction for robots.
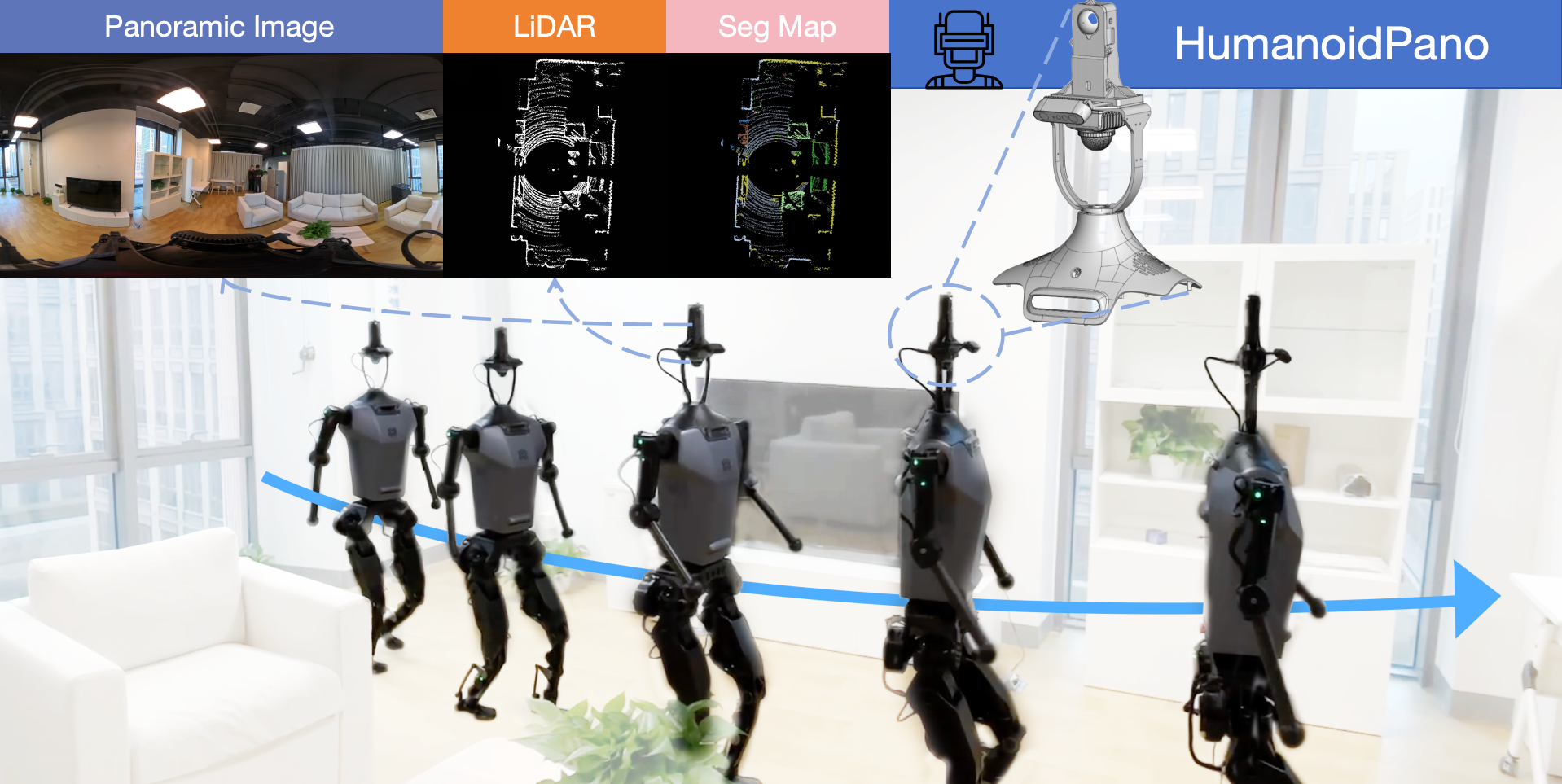
HumanoidPano: Hybrid Spherical Panoramic-LiDAR Cross-Modal Perception for Humanoid Robots
Qiang Zhang*, Zhang Zhang*, Wei Cui*, Jingkai Sun, Jiahang Cao, Yijie Guo, Gang Han, Wen Zhao, Jiaxu Wang, Chenghao Sun, Lingfeng Zhang, Hao Cheng, Yujie Chen, Lin Wang, Jian Tang†, Renjing Xu†
Under review
- We propose a novel hybrid cross-modal perception framework that synergistically integrates panoramic vision and LiDAR sensing for humanoid robots.
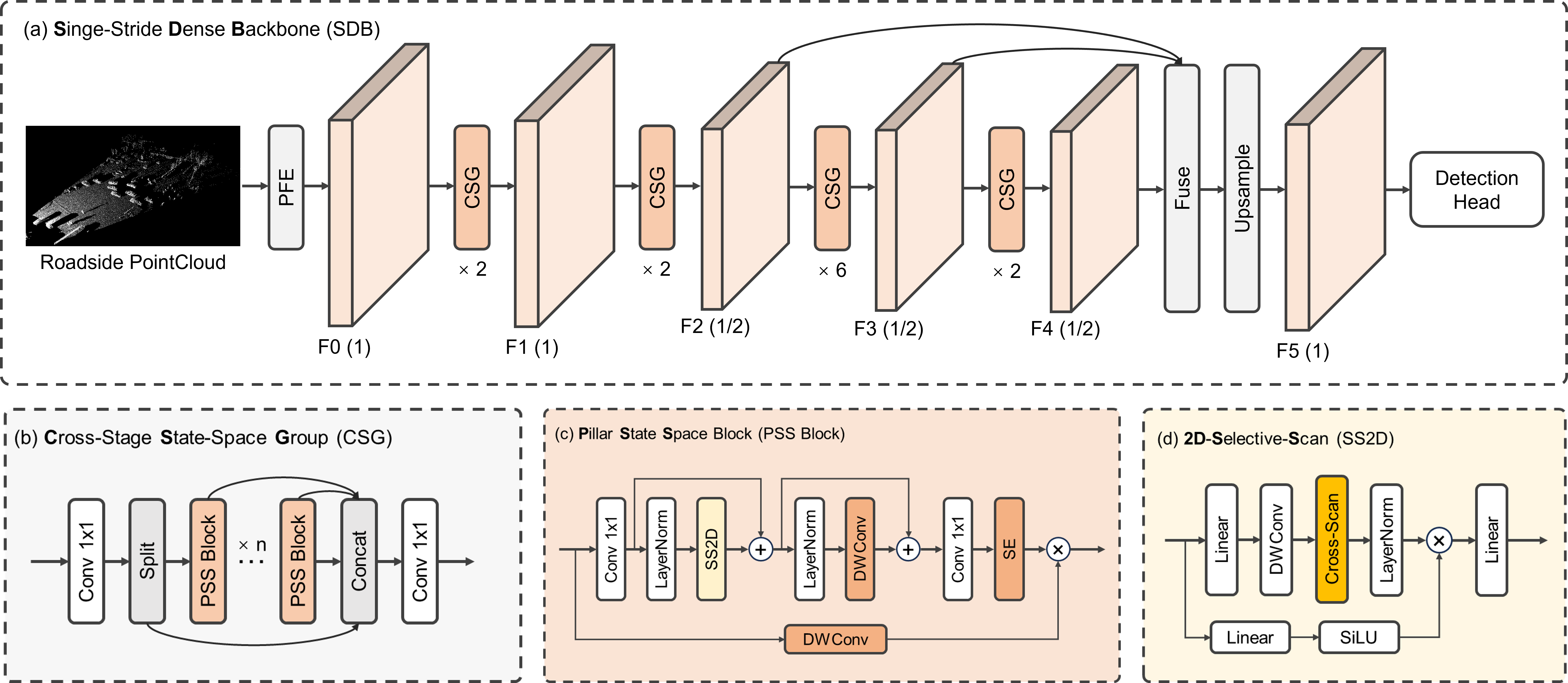
PillarMamba: Learning Local-Global Context for Roadside Point Cloud via Hybrid State Space Model
Zhang Zhang, Chao Sun†, Chao Yue, Da Wen, Tianze Wang, Jianghao Leng
Under review
We propose a local-global method to boost the power of the standard state space model and address the local connection disrupted and historical relationship forgotten.
Zhang Zhang, Chao Sun†, Chao Yue, Da Wen, Yujie Chen, Tianze Wang, Jianghao Leng
Under review
- We propose an efficient framework learning height prediction in voxel features via transformer for roadside visual perception.
🎨 All Papers
* Equal contribution † Corresponding author
Occupancy World Model for Robots
Zhang Zhang*, Qiang Zhang*, Wei Cui*, Shuai Shi, Yijie Guo, Gang Han, Wen Zhao, Jingkai Sun, Jiahang Cao, Jiaxu Wang, Hao Cheng, Xiaozhu Ju, Zhengping Che, Renjing Xu, Jian Tang†
Under review
- We restructure the OccWorld-ScanNet benchmark to evaluate the forecasting of scene evolutions.
- We propose a occupancy world model for robots’ decision and exploration.
RoboOcc: Enhancing the Geometric and Semantic Scene Understanding for Robots
Zhang Zhang*, Qiang Zhang*, Wei Cui*, Shuai Shi, Yijie Guo, Gang Han, Wen Zhao, Hengle Ren, Renjing Xu, Jian Tang†
Under review
- We present a method to enhance geometric and semantic scene understanding in 3D occupancy prediction for robots.
HumanoidPano: Hybrid Spherical Panoramic-LiDAR Cross-Modal Perception for Humanoid Robots
Qiang Zhang*, Zhang Zhang*, Wei Cui*, Jingkai Sun, Jiahang Cao, Yijie Guo, Gang Han, Wen Zhao, Jiaxu Wang, Chenghao Sun, Lingfeng Zhang, Hao Cheng, Yujie Chen, Lin Wang, Jian Tang†, Renjing Xu†
Under review
- We propose a novel hybrid cross-modal perception framework that synergistically integrates panoramic vision and LiDAR sensing for humanoid robots.
PillarMamba: Learning Local-Global Context for Roadside Point Cloud via Hybrid State Space Model
Zhang Zhang, Chao Sun†, Chao Yue, Da Wen, Tianze Wang, Jianghao Leng
Under review
We propose a local-global method to boost the power of the standard state space model and address the local connection disrupted and historical relationship forgotten.
Zhang Zhang, Chao Sun†, Chao Yue, Da Wen, Yujie Chen, Tianze Wang, Jianghao Leng
Under review
- We propose an efficient framework learning height prediction in voxel features via transformer for roadside visual perception.
Q-MambaIR: Accurate Quantized Mamba for Efficient Image Restoration
Yujie Chen, Haotong Qin†, Zhang Zhang, Michelo Magno, Luca Benini, Yawei Li†
Under review
- We propose an accurate, efficient, and flexible quantized mamaba for image restoration task.
[PillarID: Rethinking Backbone Network Designs for Pillar-based 3D Object Detection in Infrastructure Point Cloud]
Zhang Zhang, Chao Sun†, Bo Wang, Da Wen
Under review
- We propose a dense backbone-based network for utilizing the rich contextual information of the roadside point cloud effectively.
[Height3D: A Roadside Visual Framework Based on Height Prediction in Real 3D Space]
Zhang Zhang, Chao Sun†, Bo Wang, Bin Guo, Da Wen, Tianyi Zhu, Qili Ning
IEEE Transactions on Intelligent Transportation Systems (TITS), 2025.
- We propose a novel roadside visual perception framework based on the heightnet in real 3D space instead of image 2D space.